 省市场
省市场
 地方分中心
地方分中心 南京分中心
南京分中心
 淮安分中心
淮安分中心
 徐州分中心
徐州分中心
 南通分中心
南通分中心
 无锡分中心
无锡分中心
 苏州分中心
苏州分中心
 扬州分中心
扬州分中心
 镇江分中心
镇江分中心
 常州分中心
常州分中心
 连云港分中心
连云港分中心
 江阴分中心
江阴分中心
 盐城分中心
盐城分中心
 行业分中心
行业分中心 物联网分中心(无锡)
物联网分中心(无锡)
 矿山安全分中心(徐州)
矿山安全分中心(徐州)
 人工智能分中心(苏州)
人工智能分中心(苏州)
 节能环保分中心(宜兴)
节能环保分中心(宜兴)
 汽车及核心零部件分中心(常熟)
汽车及核心零部件分中心(常熟)
 机器人及精密装备制造分中心(昆山)
机器人及精密装备制造分中心(昆山)
 金属新材料分中心(张家港)
金属新材料分中心(张家港)
 高端能源装备分中心(常州)
高端能源装备分中心(常州)
 海洋可再生能源分中心(盐城)
海洋可再生能源分中心(盐城)
 高效节能分中心(镇江)
高效节能分中心(镇江)
 网络信息安全分中心(泰州)
网络信息安全分中心(泰州)
 先进复合材料分中心(宿迁)
先进复合材料分中心(宿迁)



 南京分中心
南京分中心 苏州分中心
苏州分中心 扬州分中心
扬州分中心 无锡分中心
无锡分中心 徐州分中心
徐州分中心 盐城分中心
盐城分中心 连云港分中心
连云港分中心 淮安分中心
淮安分中心 镇江分中心
镇江分中心 江阴分中心
江阴分中心 南通分中心
南通分中心 常州分中心
常州分中心 刘磊
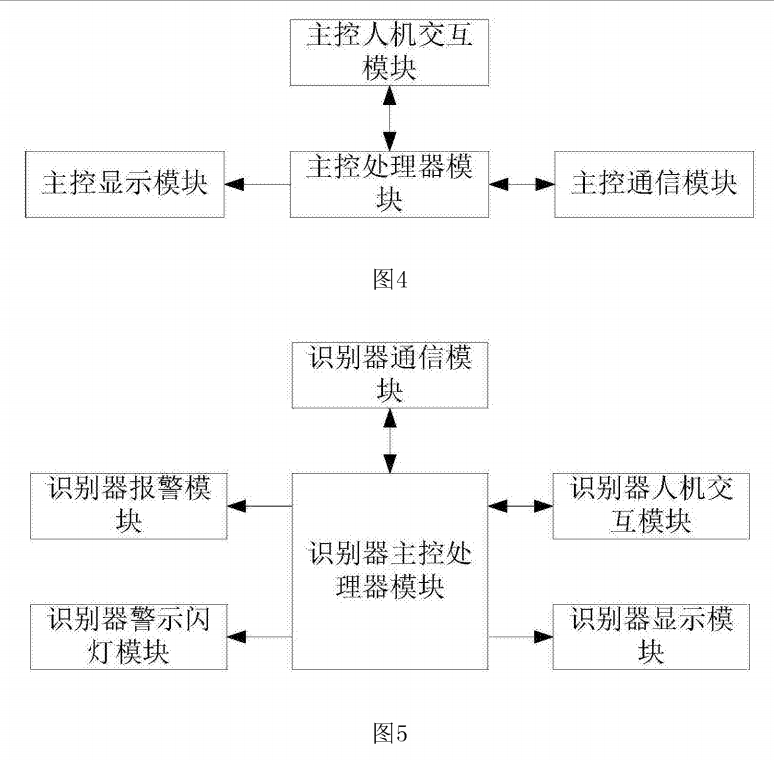
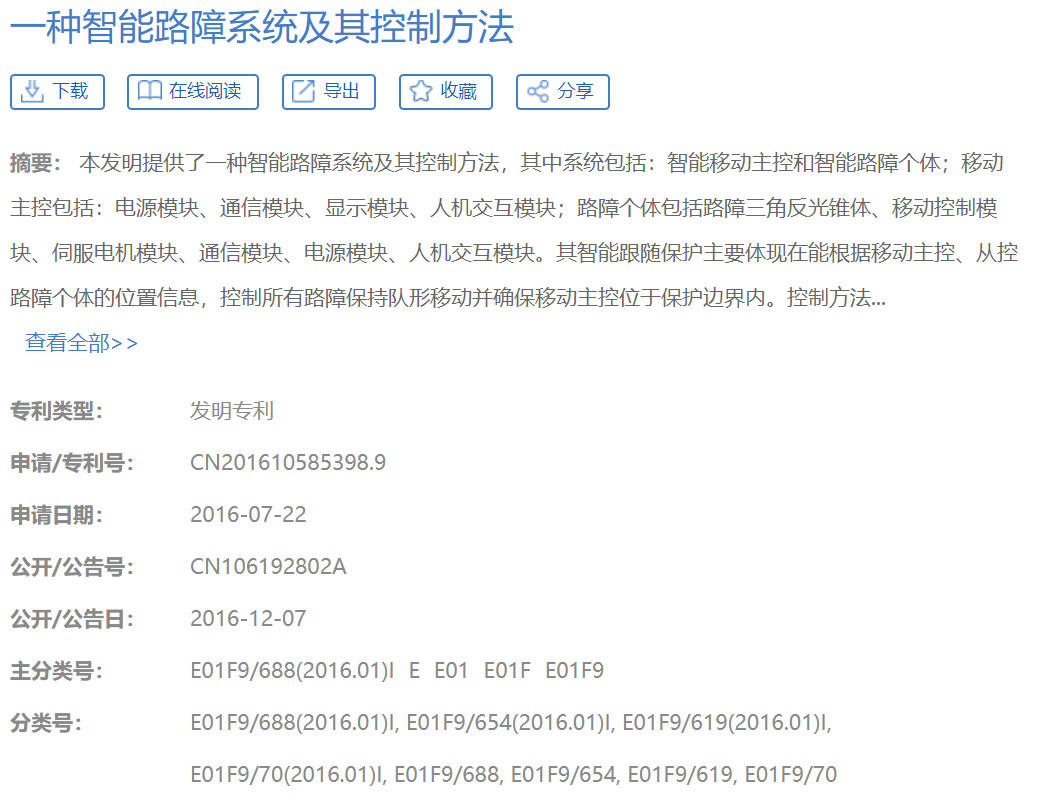
刘磊 本发明提供了一种智能路障系统及其控制方法,其中系统包括:智能移动主控和智能路障个体;移动主控包括:电源模块、通信模块、显示模块、人机交互模块;路障个体包括路障三角反光锥体、移动控制模块、伺服电机模块、通信模块、电源模块、人机交互模块。其智能跟随保护主要体现在能根据移动主控、从控路障个体的位置信息,控制所有路障保持队形移动并确保移动主控位于保护边界内。控制方法包括:开机、列队、进入工作模式、选择两个最近的从控路障个体、智能跟随、聚集、进入待机省电模式等环节。该智能路障系统及其控制方法能够使得各个路障个体跟随施工人员实时移动,及时保护工人。
| 商品类型 | 专利 | 申请号 | CN201610585398.9 | IPC分类号 | |
| 专利类型 | 发明 | 法律状态 | 审中 | 技术领域 | |
| 交易方式 | 技术转让 | 专利状态 | 已授权 | 专利权人 |
 富硒酵母及其富硒食品饮料
富硒酵母及其富硒食品饮料 面议
 一种能够精准排出货币数量且具有防护功能的金融柜
一种能够精准排出货币数量且具有防护功能的金融柜 ¥ 30,000 元
一种金融办公用便于调节的多功能折叠存储一体式办公椅 ¥ 30,000 元
基于磁性纳米药物的前列腺癌局部去势治疗技术 面议



















