 省市场
省市场
 地方分中心
地方分中心 南京分中心
南京分中心
 淮安分中心
淮安分中心
 徐州分中心
徐州分中心
 南通分中心
南通分中心
 无锡分中心
无锡分中心
 苏州分中心
苏州分中心
 扬州分中心
扬州分中心
 镇江分中心
镇江分中心
 常州分中心
常州分中心
 连云港分中心
连云港分中心
 江阴分中心
江阴分中心
 盐城分中心
盐城分中心
 行业分中心
行业分中心 物联网分中心(无锡)
物联网分中心(无锡)
 矿山安全分中心(徐州)
矿山安全分中心(徐州)
 人工智能分中心(苏州)
人工智能分中心(苏州)
 节能环保分中心(宜兴)
节能环保分中心(宜兴)
 汽车及核心零部件分中心(常熟)
汽车及核心零部件分中心(常熟)
 机器人及精密装备制造分中心(昆山)
机器人及精密装备制造分中心(昆山)
 金属新材料分中心(张家港)
金属新材料分中心(张家港)
 高端能源装备分中心(常州)
高端能源装备分中心(常州)
 海洋可再生能源分中心(盐城)
海洋可再生能源分中心(盐城)
 高效节能分中心(镇江)
高效节能分中心(镇江)
 网络信息安全分中心(泰州)
网络信息安全分中心(泰州)
 先进复合材料分中心(宿迁)
先进复合材料分中心(宿迁)




 南京分中心
南京分中心 苏州分中心
苏州分中心 扬州分中心
扬州分中心 无锡分中心
无锡分中心 徐州分中心
徐州分中心 盐城分中心
盐城分中心 连云港分中心
连云港分中心 淮安分中心
淮安分中心 镇江分中心
镇江分中心 江阴分中心
江阴分中心 南通分中心
南通分中心 常州分中心
常州分中心 苏州苏大技术转移中心有限公司
苏州苏大技术转移中心有限公司 本申请公开了一种时间最优机器人曲面加 工过程规划方法,属于精密加工这一技术领域,其设计要点在于:包括三大步骤:机器人曲面加工过程速度规划、以时间参数B‑spline为基础的速度规划结果表征以及面向ROS中position_ velocity_acceleration_controller控制器的轨迹生成。采用本申请的方法,可以有效的提高了机器人曲面加工效率,可适用于高速高精机器人复杂曲面零件加工。
| 商品类型 | 技术成果 | 项目阶段 | 试生产 | 成果权属 | 独占 |
| 技术领域 | 交易方式 | 独占许可 | 权属人 |
 电子元器件老炼测试设备
电子元器件老炼测试设备 ¥ 25,000 元
 一种高熔体强度聚乳酸组合物及其制备方法
一种高熔体强度聚乳酸组合物及其制备方法 面议
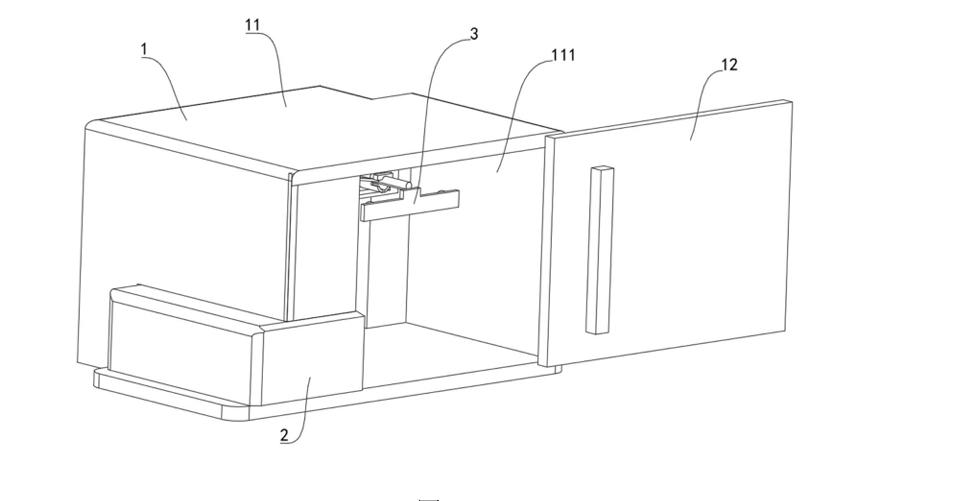
一种垂直片状结构半导体传感器保护装置 面议
一种高浓度高稳定的微纳米氢气泡水生成装置及方法 面议



















